
- DPT naprava
- Razvrstitev motorjev PT
- Značilnosti delovanja ventilov
- Lastnosti naprave brez ščetk
- Struktura stopenjske vrste opreme
- Načelo delovanja
Nastanek ideje o DC motorju (DCT) se je pojavil v začetku XIX stoletja. Znani fiziki Alessandro Volta, M. Faraday in P. Barlow so svojo vizijo tega procesa vnesli v zgodovino. B. S. Jacobi velja za izumitelja elektromotorja, saj je bil on tisti, ki mu je uspelo izdelati napravo z vrtečo se armaturo, kar je bilo mogoče uporabiti v praksi. Čeprav je bil prvi motor z majhno močjo, je naslednji že postavil čoln v gibanje.
 >
>
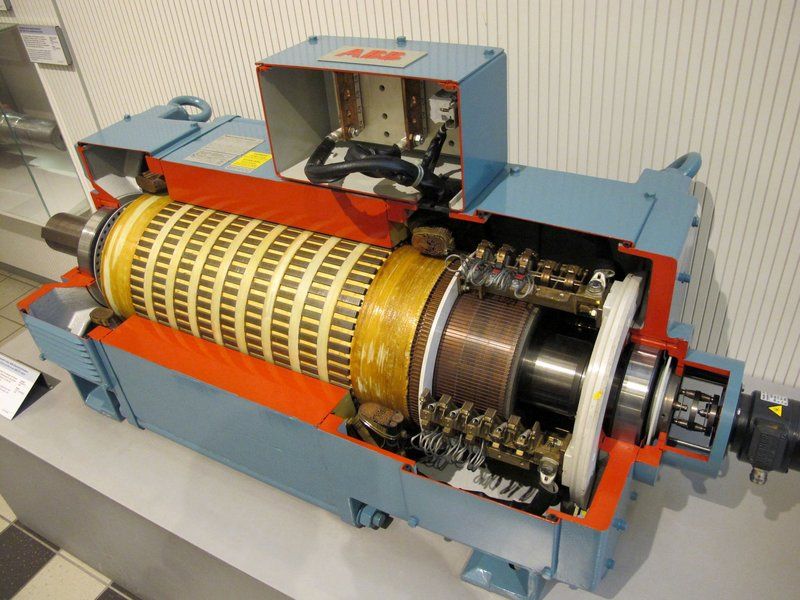
DPT naprava
Glavni deli električnega enosmernega stroja so magneti in navitja. Pomožni deli vključujejo ohišje, jedro, gred, zbiralnik in mehanizem ščetk. Vse te podrobnosti imajo svoj namen.
Jedra premičnih in pritrjenih delov niso narejena iz celostne konstrukcije, temveč iz listov električnega jekla. Ta strukturna značilnost omogoča praktično odpravljanje vrtinčnih tokov.
Neposredna dolžnost kolektorja je pretvorba izmeničnega toka, ki nastane v navitju armature, v konstantno. Zbiralnik je enota, ki je značilna za enosmerne stroje. Je pa tudi najbolj ranljiv, saj skoraj polovica vseh elektromotorjev med delovanjem odpove ravno zaradi njegove okvare. Odsotnost zbiralca v strukturi asinhronega ali sinhronega stroja izboljša njegovo zanesljivost. Ta prednost ostaja tako za trifazne kot tudi za enofazne napajalnike.
Upravljanje enosmernega motorja pomeni spremembo hitrosti vrtenja, saj je njegova glavna naloga spraviti v pogon obratovalne mehanizme. Hitrost vrtenja lahko spreminjamo na tri načine:
- sprememba napetosti, ki se napaja;
- sprememba upora v vezju armature;
- sprememba magnetnega pretoka v vzbujevalnem krogu.
Razvrstitev motorjev PT
Razlike med vrstami elektromotorjev so v vrsti magnetov in načinu vzbujanja. Magneti so lahko trajni ali elektromagneti. Prednosti stalnega magneta (v nasprotju z elektromagnetom):
- kompaktnost;
- Za delovanje ne potrebuje vira energije.
Slabosti sta nezmožnost prilagajanja jakosti magnetnega pretoka in razmagnetizacije skozi čas.
Vrsta vzbujanja DCB je odvisna od točke priključka navitja droga. V zvezi s tem razlikujejo med samostojnim vzbujanjem motorja (navitje vzbujanja poganja zunanji vir) in samovžiganjem (navitje vzbujanja je povezano z navitičem armature). Samovzbujajoči motorji imajo krajša imena:
- shunt (vzporedna povezava navitij);
- serijska (serijska povezava navitij);
- spojina (mešana povezava navitij).
Elektromotorji se uporabljajo na različnih področjih industrije in kmetijstva, pa tudi v domačih napravah. Njihova raznolikost je velika. Glavne vrste DPT:
- tradicionalni namen;
- poseben namen.
Značilnosti delovanja ventilov
Ventilski motorji pripadajo posebnim namenskim električnim strojem. Svoje ime dolgujejo uporabi naprav za usmerjanje toka v njih - ventilov. Prednosti ventilskih elektromotorjev:
- široka sprememba hitrosti vrtenja;
- večji izkoristek zaradi zmanjšanih magnetnih izgub zaradi nizkega magnetnega upora;
- tudi pri največji obremenitvi je zmogljivost precej dobra.
Poleg prednosti imajo tudi nekatere pomanjkljivosti. Toda njihova vrednost ni velika. Glavne so:
- hrupnost
- poslovodstvo zahteva določeno usposobljenost osebja;
- visoka cena.
 Njihove uporabe so različne: v proizvodnji nafte, kemični industriji in vrtalnih ploščicah.
Njihove uporabe so različne: v proizvodnji nafte, kemični industriji in vrtalnih ploščicah.
Glavna razlika med ventilom in običajnim motorjem je zasnova. Ventil nima nekaterih običajnih delov konstrukcije: zbiralnika in mehanizma krtače. Namesto tega je nameščeno stikalo (pretvornik), s pomočjo katerega se upravlja ventilski motor. Pretvornik sprejema signal s senzorja položaja rotorja.
Senzorji položaja rotorja so lahko transformatorski ali induktivni brezkontaktni elementi. Najpogostejši so elektromotorni senzorji Hallovega učinka. Takšna naprava je sestavljena iz majhne plošče polprevodniškega materiala. Na njem so kontaktne povezave, na katere so priključeni vodi, povezani z virom napajanja. Izhodi izhodnega signala so tudi spajkani na ustrezne povezave plošče. Zahteve za senzorje položaja rotorja so:
- kompaktnost;
- najmanjša vrednost vhodne moči;
- velika večkratnost signala, tako največja kot minimalna;
- zanesljivo delovanje v kakršnih koli okoljskih pogojih.
 Stikalo je narejeno na polprevodnikih. Njegova naloga je podobna nalogi enote za zbiranje krtač v običajnih motorjih in je sestavljena iz spreminjanja smeri toka. Sidrno navijanje je nameščeno na jedru ležišča, na rotorju pa je nameščen trajni magnet. Ta zasnova odpravlja možnost drsnega stika na sidru.
Stikalo je narejeno na polprevodnikih. Njegova naloga je podobna nalogi enote za zbiranje krtač v običajnih motorjih in je sestavljena iz spreminjanja smeri toka. Sidrno navijanje je nameščeno na jedru ležišča, na rotorju pa je nameščen trajni magnet. Ta zasnova odpravlja možnost drsnega stika na sidru.
Motor ventila ima tok v sinusnih fazah. Vzbujanje je lahko dveh vrst:
- elektromagnetno;
- magnetoelektrični.
Z elektromagnetnim vzbujanjem se poljsko navijanje nahaja na polovicah. Na mrežo je povezan z drsnimi obroči, nameščenimi na gredi rotorja. Tako nastajanje magnetnega polja poteka z elektromagnetnimi sredstvi.
Pri magnetoelektričnem vzbujanju ne bo drsnega stika v vzbujevalnem krogu ali v sidrnem vezju. Stalni magneti bodo delovali kot drogovi. Te motorje imenujemo brezkrtačni motorji.
Lastnosti naprave brez ščetk
 DC brezkrtačni motor (BDTT) se bistveno razlikuje od motorja z ventili. Njegov tok v fazah izgleda trapezno. BDTT je urejen bolj preprosto: modulacija širine impulza se nadomesti s preklopom 120 ali 180 stopinj. Glavne naloge brezkrtačnega motorja so natančen položaj rotorja v zahtevanem intervalu in velika hitrost vrtenja.
DC brezkrtačni motor (BDTT) se bistveno razlikuje od motorja z ventili. Njegov tok v fazah izgleda trapezno. BDTT je urejen bolj preprosto: modulacija širine impulza se nadomesti s preklopom 120 ali 180 stopinj. Glavne naloge brezkrtačnega motorja so natančen položaj rotorja v zahtevanem intervalu in velika hitrost vrtenja.
Zasnova je lahko dve vrsti: z magneti na gibljivem delu (sidro) ali brez gibanja (stator). Naprave za avtomatizacijo za hlajenje pogonskih pogonov z zasnovo zasidranih magnetov. Njihova značilnost je hitro doseganje visoke hitrosti.
 V sistemih medicinske opreme je namestitev magnetov na stator pogosta. Te mikroskope imenujemo motorji z visokim navorom. Njihova hitrost vrtenja ni tako velika, vendar zaradi pomanjkanja navitja vzbujanja in prisotnosti stalnih magnetov dobro opravijo preobremenitev in ohranjajo natančnost položaja v prostoru.
V sistemih medicinske opreme je namestitev magnetov na stator pogosta. Te mikroskope imenujemo motorji z visokim navorom. Njihova hitrost vrtenja ni tako velika, vendar zaradi pomanjkanja navitja vzbujanja in prisotnosti stalnih magnetov dobro opravijo preobremenitev in ohranjajo natančnost položaja v prostoru.
Signal navitjem takšnih električnih strojev bo prišel od voznika, katerega naloga je nadziranje navora. Da bi se sidro obrnilo pod določenim kotom, je potrebno na napetosti nanesti na potrebna navitja. Gladkosti vrtenja ni mogoče vzdrževati, vendar je mogoče doseči visoko hitrost vrtenja.
Razlika med kolektorskimi in brezkrtačnimi motorji je tako v strukturi kot tudi v delovanju. Kolektorski motorji ne potrebujejo krmilnika, vendar je delovanje brezkrtačnega motorja brez njegove udeležbe nesprejemljivo. Prednosti brezkrtačnih motorjev:
- sposobnost dela v pogojih z različnimi značilnostmi okolja;
- dolgotrajna uporaba;
- zanesljivost pri delu.
 Pomanjkljivost so stroški. Dokaj visok je zaradi prisotnosti polprevodniškega stikala, trajnega magneta in občutljivih elementov v strukturi.
Pomanjkljivost so stroški. Dokaj visok je zaradi prisotnosti polprevodniškega stikala, trajnega magneta in občutljivih elementov v strukturi.
Sestaviti ventil ali DPT z lastnimi rokami je nehvaležno opravilo. Materiali, zahtevnost dela in porabljeni čas bodo veliko dražji od denarja, porabljenega za nakup tovarniškega motorja. Toda tudi zanesljivost in varnost bosta tudi nekajkrat višji.
Izbor teh električnih strojev mora potekati na podlagi značilnosti gonilnikov z modulacijskimi kanali:
- končni stres ob dolgotrajni uporabi;
- največja hitrost vrtenja;
- dovoljena jakost toka;
- trenutna frekvenca (navadne naprave 7-8 kHz, bolj napredni modeli - 16-32 kHz).
 Glavne povezave pri upravljanju brezkrtačnega motorja so senzorji položaja. Signal iz njih se prenaša na krmilnik in kot posledica tega pride do preklopa. Toda delovanje teh naprav brez senzorjev je možno. V tem primeru igra vlogo padca napetosti čez navitje, ki v nekem trenutku ne deluje.
Glavne povezave pri upravljanju brezkrtačnega motorja so senzorji položaja. Signal iz njih se prenaša na krmilnik in kot posledica tega pride do preklopa. Toda delovanje teh naprav brez senzorjev je možno. V tem primeru igra vlogo padca napetosti čez navitje, ki v nekem trenutku ne deluje.
Po številu faz so številni motorji trifazni, za njihovo krmiljenje pa je potrebno dodatno vozlišče v napravi - enosmerni usmernik v trifaznem impulzu. Krmiljenje trifaznega brezkrtačnega DC motorja povzroča tudi nekaj težav zaradi vzporednega krmiljenja več parametrov. Ker so električni stroji naprave reverzibilni, je mogoče brezkrtačni motor priključiti kot generator.
Struktura stopenjske vrste opreme
Različni motorji s posebnim namenom so koračni motorji. Včasih jih imenujemo impulz. Nanašajo se na sinhrone elektromotorje za posebne namene. Načelo njihovega delovanja je, da se koračni koraki na izhodu dobijo zaradi napetostnih impulzov na vhodu. Vrste koračnih motorjev po vrsti rotorja:
- navdušen;
- reaktivni.
Struktura naprave z aktivnim rotorjem kaže na prisotnost elektromagnetov ali trajnih magnetov v njej. V motorjih z jet rotorjem ni terenskega navijanja. Rotor je izdelan iz mehkega magnetnega materiala.
Krmilno navijanje je nameščeno na fiksnem delu - statorju. Glede na število faz je lahko drugačno, vendar so najpogostejša trifazna navitja.
Načelo delovanja
 Če ima koračni motor na statorju dva para polov z dvema krmilnima navitjema, potem bo njeno vrtenje odvisno od napajanja napetosti v krmilnem navitju. Ko se signal usmeri na krmilno navitje, ki je nameščeno na prvem paru, se bo rotor obrnil in zavzel položaj vzdolž svoje osi. Ko se na navitju drugega para polov pojavi signal, bo moral rotor zavzeti položaj med tema polovoma.
Če ima koračni motor na statorju dva para polov z dvema krmilnima navitjema, potem bo njeno vrtenje odvisno od napajanja napetosti v krmilnem navitju. Ko se signal usmeri na krmilno navitje, ki je nameščeno na prvem paru, se bo rotor obrnil in zavzel položaj vzdolž svoje osi. Ko se na navitju drugega para polov pojavi signal, bo moral rotor zavzeti položaj med tema polovoma.
Ko se signal izklopi na navitju prvega para in preostali signal na krmilnem navitju drugega para polov, se bo rotor vrtel na svoji osi. Tako se bo, ko se vrti, zdelo, da dela korake, zato nosi takšno ime. Koraki motorja (kot vrtenja rotorja) z dvema paroma polov bo enak 45 stopinj. Preklopni sistem bo štiritaktni.
Pri stikalnem stikalu s potisnim vlekom z enakim številom parov parov je potrebno, da signal vedno prispe samo do enega specifičnega krmilnega navitja določenega pola. Nato se bo kota vrtenja rotorja spremenila in bo znašala 90 stopinj.
Da je načelo delovanja stepper motorja razumljivo tudi za lutke, morate biti pozorni na shemo.

Rotor bo zasedel prostor v primerjavi s parom polov, na navitju katerih se napaja. Če se dve navitji napajata do navitij sosednjih polov, bo rotor zasedel položaj med njimi. Manjša je vrednost koraka motorja, bolj natančno in stabilno je njegovo delovanje.
Steper motor zahteva stikalo. Njegova naloga je pretvoriti kontrolne impulze določenega zaporedja v pravokotne impulze v sistemu z potrebnim številom faz.
Z veliko obremenitvijo motorja bo natančnost vrtenja rotorja oslabljena. Zasukal se bo z nekaj zaostajanja, kar je kot statične napake. Ko koračni motor deluje v prostem teku, je vrednost kota statične napake enaka nič.
Ker je hitrost procesov obratno sorazmerna z upornostjo krmilnih navitij, potem za pospešitev vrtenja rotorja uporabimo upore. Ti so serijsko povezani z vezjem krmiljenja navitja statorja. Ocenite učinkovitost dela na glavnem kazalcu - vrednosti vhodne moči.