
- Razlike in sorte koračnih motorjev
- Zasnova in načelo delovanja
- Metode faznega nadzora
- Metode nadzora koračnih motorjev
- Način pogona z mikro korakom
 Stepper motor je elektromehanska naprava, ki pretvori električne signale v diskretne kotne premike gredi. Uporaba koračnih motorjev omogoča delovnim telesom strojev strogo odmerjena gibanja s pritrditvijo njihovega položaja na koncu gibanja.
Stepper motor je elektromehanska naprava, ki pretvori električne signale v diskretne kotne premike gredi. Uporaba koračnih motorjev omogoča delovnim telesom strojev strogo odmerjena gibanja s pritrditvijo njihovega položaja na koncu gibanja.
Uporabljajo se v CNC strojih, robotiki, kjer so potrebni diskretni premiki, fiksacija položaja in nizka hitrost.
Razlike in sorte koračnih motorjev
Po načelu delovanja so bližje enosmernim motorjem. Zasnova elektromotorjev se nenehno izboljšuje, da zmanjša stroške dela v proizvodnji, poveča učinkovitost in poveča število vrtljajev. V primerjavi z enosmernim motorjem nimajo krtače, kolektorja in navitij z manj zavoji.
Med prvimi motorji je nastal miniaturni motor za uro in imenovan po francoskem inženirju Mariusu Lovetu. Stator se odklopi na robovih ali v območju rotorja ima majhne zožitve. Rotor s premerom 1, 5 mm, magnetno na osnovi kobalta. Eno navijanje v eni vrsti moči 1, 5 voltov. Kot vrtenja je 90 stopinj.
Motor lavete se uporablja tudi v medicini za črpanje različnih tekočin, pogosto pa se uporablja tudi v mešalnikih in mešalnikih.
V zadnjem času se razvijajo piezoelektrični motorji, ki uporabljajo piezomagnetni učinek in uporabljajo feromagnetne materiale v konstrukciji. Izboljšani so linearni motorji, pri katerih se gred ne vrti, ampak izvaja linearne premike. Za natančno mehansko opremo ruski proizvajalci proizvajajo motorje s serijsko oznako:
 DS.
DS.- DShR.
- DShG.
- DSL.
- SHD.
- DSE
Takšna podjetja, kot so NPO ATOM, ZETEK, podjetje Elektroprivod, Stepmotor, Vekson, NPO RIF, Saratov el. mehanični, VNIIEM Corporation, ZAO Uralelectromash, ARC Energoservice. Tuja podjetja: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron in drugi se ukvarjajo s proizvodnjo motornih pogonov FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD. Paleta proizvedenih motornih pogonov je raznolika: po velikosti, moči, z vgrajenim menjalnikom in krmilno ploščo.
Zasnova in načelo delovanja
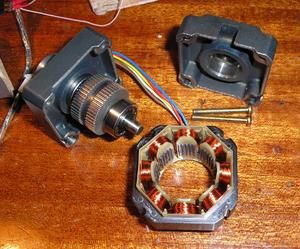
 Stepper motor je sestavljen iz statorja in vrtljivega rotorja. Jedro statorja je izdelano v obliki niza listov električnega jekla (žigosano). To zmanjšuje vrtinčne tokove in s tem segrevanje. Stator je obodno razdeljen na 4.6, 8 vzdolžnih žlebov. Velja in še več. Na izrastkih med žlebovi so navitja v obliki tuljav. Število utorov ustreza številu motornih polov. Več kolkov je manjši kot vrtenja rotorja, to je nagib.
Stepper motor je sestavljen iz statorja in vrtljivega rotorja. Jedro statorja je izdelano v obliki niza listov električnega jekla (žigosano). To zmanjšuje vrtinčne tokove in s tem segrevanje. Stator je obodno razdeljen na 4.6, 8 vzdolžnih žlebov. Velja in še več. Na izrastkih med žlebovi so navitja v obliki tuljav. Število utorov ustreza številu motornih polov. Več kolkov je manjši kot vrtenja rotorja, to je nagib.
Rotor je sestavljen iz enega ali dveh stalnih magnetov s konci, katerih kovinske plošče so pritrjene z zobmi. V tem primeru sta pluse S in N trajnega magneta razdeljena na n polov, kar ustreza številu zob. Vpliva tudi na velikost koraka vrtenja. Glede na zasnovo rotorja izdelamo tri vrste:
- reaktivno;
- trajni magnetni rotor;
- hibridni.
 Reaktivno - rotor je izdelan iz feromagnetnega materiala z vzdolžnimi utori, drogovi. Redko se uporablja, le za preproste naloge. Predvsem zaradi dejstva, da nima trenutka zaklepanja. Hibridni - rotor je izdelan iz dveh polovic feromagnetnega materiala, z vzdolžnimi utori in med njimi je nameščen trajni magnet. Žlebovi polovic med seboj so premaknjeni pod majhnim kotom, da se zmanjša naklon. Najpogosteje se uporabljajo.
Reaktivno - rotor je izdelan iz feromagnetnega materiala z vzdolžnimi utori, drogovi. Redko se uporablja, le za preproste naloge. Predvsem zaradi dejstva, da nima trenutka zaklepanja. Hibridni - rotor je izdelan iz dveh polovic feromagnetnega materiala, z vzdolžnimi utori in med njimi je nameščen trajni magnet. Žlebovi polovic med seboj so premaknjeni pod majhnim kotom, da se zmanjša naklon. Najpogosteje se uporabljajo.
Ko se na navijanje statorja uporabi impulzna napetost, se ustvari elektromagnetno polje. Medsebojno delovanje z najbližjim polom stalnega magneta ustvarja navor. Gred motorja zasuka določen kot. Kot vrtenja je večinoma odvisen od števila polov rotorja.
Tak motor se bo imenoval stepper. Zaradi majhnosti WD serije Em 422 se uporablja v matričnih tiskalnikih.
Metode faznega nadzora
Krmiljenje je večinoma odvisno od števila polov in konfiguracije navitij statorja. SD se proizvajajo predvsem z naslednjimi navitji:
- Dva navitja s 4 zatiči.
- Dva navitja s 6 žicami s povprečnim terminalom.
- Štiri navitja - 8 zaključkov.
 Lahko nadzorujete dve metodi, uporabite unipolarno napetost - unipolarno ali bipolarno - bipolarno. Unipolarni stepper motor ima 4 pola in 2 navitja. V štirifazni fazi je vsako navijanje razdeljeno na polovico in je nameščeno na nasprotnih polov. Vrtenje se izvaja z izmeničnim nanašanjem napetosti na navitja. S 6 vodi ali 5, prav tako 2 navitja, vendar s pipo od sredine. Običajno so srednji vodi tuljave povezani skupaj z negativno žico, pozitivni prek upravljanih tipk pa se dovajajo do navitij.
Lahko nadzorujete dve metodi, uporabite unipolarno napetost - unipolarno ali bipolarno - bipolarno. Unipolarni stepper motor ima 4 pola in 2 navitja. V štirifazni fazi je vsako navijanje razdeljeno na polovico in je nameščeno na nasprotnih polov. Vrtenje se izvaja z izmeničnim nanašanjem napetosti na navitja. S 6 vodi ali 5, prav tako 2 navitja, vendar s pipo od sredine. Običajno so srednji vodi tuljave povezani skupaj z negativno žico, pozitivni prek upravljanih tipk pa se dovajajo do navitij.
Bipolarni motorji imajo 4 navitja, po 2 za vsako fazo. Nadzor se pojavi, ko se spremeni polarnost navijanja. S tem upravljanjem je shema povezave stepper motorja zapletena, vendar navora pridobi več. Glavne značilnosti so napajalna napetost, porabljeni fazni tok, korak, moč in velikost prirobnice. Sedeži so standardizirani in označeni kot na primer Nema 23. To ustreza razdalji med luknjami za pritrditev 57 mm.
Metode nadzora koračnih motorjev
 Uporaba motornih pogonov v CNC strojih konkurira samo s servo pogoni, na primer v erozijskih strojih ali tiskalnikih, jih celo presegajo po svojih tehničnih zmogljivostih, stroških in enostavni shemi upravljanja. Upravljanje lahko izvajate na digitalnih mikrokrogih, specializiranih - A3977, na programiranem PIC16, prek tipk ali gonilnikov SMSD 1.5.
Uporaba motornih pogonov v CNC strojih konkurira samo s servo pogoni, na primer v erozijskih strojih ali tiskalnikih, jih celo presegajo po svojih tehničnih zmogljivostih, stroških in enostavni shemi upravljanja. Upravljanje lahko izvajate na digitalnih mikrokrogih, specializiranih - A3977, na programiranem PIC16, prek tipk ali gonilnikov SMSD 1.5.
Večino gonilnikov upravlja računalnik prek vrat RS-232, USB in LPT. Generirajo krmilne signale: korak, smer, ločljivost in zagotavljajo ½ koračni delitev do 1/32 in delajo s programi: MACH3, KCam, DeskCNC, Turbocnc in drugimi. Motor priključite na gonilnik s kablom, kot je opisano. Ko je preučil delo programa, ni težko začeti delati. Za vključitev se uporablja napetost od 5 voltov do 48 voltov. Izjema so motorji 220/110 voltov .
Način pogona z mikro korakom
Glavni čas delovanja koračnega motorja je v načinu korak po korak ali pol koraka, pri zagonu in zaustavitvi pa je za natančno fiksacijo priporočljivo uporabiti mikrostopenjski način. Način po korakih določata zasnova in nadzor impulza. Med mikrostopom se na navitja nanesejo sinusne napetosti z želenim faznim premikom.
Rotor je fiksiran v določenem razmerju faz tokov v navitjih. Izračun ravnotežne točke po formuli x = S * pi / 2 * arctan a / b, kjer:
- a je trenutek, ki ga ustvari prva faza, in b je druga faza;
- x je ravnotežna točka rotorja ali mikrostopa v radianih;
- S je kotni korak.
 Prav tako je treba upoštevati največjo frekvenco krmilnega signala, pri kateri ni izgube ali dodatnega koraka med delovanjem. Je glavni indikator prehodnega načina koračnega motorja in je v lastnostih naveden kot pogostost odzivnosti motorja.
Prav tako je treba upoštevati največjo frekvenco krmilnega signala, pri kateri ni izgube ali dodatnega koraka med delovanjem. Je glavni indikator prehodnega načina koračnega motorja in je v lastnostih naveden kot pogostost odzivnosti motorja.
Med delovanjem je potrebno spremljati čistočo okoli pogona in preprečiti, da bi kovinski čipi vstopili, možna je okvara motornega pogona. Poiščite način zaščite pogona. Popravilo je podobno popravilu motorja komutatorja, zahteva natančnost.
Po demontaži vzemite in napihnite stator s stisnjenim zrakom in rotor obrišite z krpo. Preverite iztekanje ležaja.