
- Kaj je pretvorba frekvence
- Izbira motorja
- Pridobivanje magnetnega polja
- Industrijski frekvenčni pogoni
- Prednosti uporabe frekvenčnih pretvornikov
- Vektorska in frekvenčna regulacija
- Tehnična izvedba pretvornikov
- Načelo regulacije hitrosti
 Precej pogosto mora veliko šunke ali samo poslovneži nadzorovati hitrost trifaznega motorja. Za to nima smisla uporabljati banalnega regulatorja moči, saj je zgrajen na principu spreminjanja napetosti, pa vendar, kot veste, motorji izmeničnega toka ne želijo biti regulirani na tak način, tudi enofazni.
Precej pogosto mora veliko šunke ali samo poslovneži nadzorovati hitrost trifaznega motorja. Za to nima smisla uporabljati banalnega regulatorja moči, saj je zgrajen na principu spreminjanja napetosti, pa vendar, kot veste, motorji izmeničnega toka ne želijo biti regulirani na tak način, tudi enofazni.
Obrti se bodo seveda spremenili, vendar le v majhni in skoraj neopazni meji, po kateri se ob doseganju spodnjega praga in pri napajanju pri 150 V 220 V vrtljaji popolnoma ustavijo. Če mora gred dobiti tudi običajen trenutek, na primer pri urejanju hitrosti transporterja ali letve, odvisno od tega, na kaj je priključena, je primeren le frekvenčni pretvornik.
Kaj je pretvorba frekvence
 Pod pojmom frekvenčna pretvorba in nato frekvenčni pretvornik bi morali razumeti celoten sistem, ki nekaj naredi. Namreč, pretvori frekvenco napajalnega navitja asinhronskega napetostnega motorja. Se pravi, vašo pozornost usmerimo na dejstvo, da se tu ne spreminja napetost, ampak njena frekvenca. V tem načinu upravljanja se ohrani trenutek na gredi motorja, ko se spremeni njegova hitrost vrtenja.
Pod pojmom frekvenčna pretvorba in nato frekvenčni pretvornik bi morali razumeti celoten sistem, ki nekaj naredi. Namreč, pretvori frekvenco napajalnega navitja asinhronskega napetostnega motorja. Se pravi, vašo pozornost usmerimo na dejstvo, da se tu ne spreminja napetost, ampak njena frekvenca. V tem načinu upravljanja se ohrani trenutek na gredi motorja, ko se spremeni njegova hitrost vrtenja.
Toda, da naredite frekvenčni pretvornik z lastnimi rokami, si morate zapomniti zasnovo in možne značilnosti delovanja asinhronskih motorjev. Še več, pri odločitvi za posebno izdelavo takšne naprave je prvi korak iskanje motorja, ki bo primeren za parametre, ki bo kos delu, ki mu je dodeljeno kot del končnega kompleksa.
Izbira motorja
Če želite oblikovati domači chastotnik, se morate najprej spomniti, kaj je asinhroni motor in kako deluje. Neinhronski motor ali DPT je mehanska naprava, sestavljena iz statorja s poljskimi navitji in rotorja. Druga komponenta je lahko:
 kratkostični, torej srednji vodniki so na koncih povezani z obroči, sami pa so debeli in kratki, zato se zasnova imenuje "kolo veverice";
kratkostični, torej srednji vodniki so na koncih povezani z obroči, sami pa so debeli in kratki, zato se zasnova imenuje "kolo veverice";- faza, ima rotor več navitij, ki so priključena na drsne obroče, ki se uporabljajo za odstranjevanje napetosti v načinu generatorja.
Načelo delovanja motorja je zelo preprosto in je sestavljeno iz vpliva vrtečega se magnetnega polja, ustvarjenega v statorju, na rotor kletke z veverico, v katerem se pojavi emf. Zaradi tega v rotorju začne teči tok, kar vodi v nastanek sil, ki vplivajo na magnetno polje statorja. V tem primeru sta hitrost rotorja in magnetno polje neenakomerna, zato je ime asinhroni motor.
Smiselno je domnevati, da če spremenite frekvenco napetosti, ki napaja stator, se hitrost rotorja spremeni. Pravzaprav zato vsa resna podjetja za krmiljenje takšnih motorjev uporabljajo natančno frekvenčne pretvornike. Ko z lastnimi rokami oblikujete vezje frekvenčnega pretvornika za električni motor, morate upoštevati vrsto motorja in vse njegove značilnosti. Predvsem moč, število polov in največjo hitrost vrtenja. Pripravljene sheme lahko prenesete iz spletne revije "Radiocot" . Veliko jih je .
Pridobivanje magnetnega polja
 Za pridobitev trifaznega vrtečega se magnetnega polja je potrebno skozi tuljavo na statorju prenesti tok z zahtevano frekvenco, ki bo določena s formulo: iA = I m sinωt. Kot rezultat delovanja tega toka MDS FA začne delovati vzdolž osi zavoja. Ker se zavoji v statorju izmenično spreminjajo v fazah, bo valovanje imelo enak značaj in ustvarjalo skupno pulzirajočo silo F, ki je konstanta. Opredeljen je kot koren kvadratnih sil v dveh zavojih, ki sta medsebojno pomaknjeni pod kotom 90 °.
Za pridobitev trifaznega vrtečega se magnetnega polja je potrebno skozi tuljavo na statorju prenesti tok z zahtevano frekvenco, ki bo določena s formulo: iA = I m sinωt. Kot rezultat delovanja tega toka MDS FA začne delovati vzdolž osi zavoja. Ker se zavoji v statorju izmenično spreminjajo v fazah, bo valovanje imelo enak značaj in ustvarjalo skupno pulzirajočo silo F, ki je konstanta. Opredeljen je kot koren kvadratnih sil v dveh zavojih, ki sta medsebojno pomaknjeni pod kotom 90 °.
Posledično nastane vrtenje polja s kotno hitrostjo, izraženo s formulo za vsak obrat posebej: ω = 2π f 1. Toda za izračun hitrosti polja v celotnem stroju je potrebno upoštevati skupno število parov polov, izraženo s simbolom p. In takrat bo hitrost polja enaka: ω 0 = 2π f 1 / p. V skladu s tem je mogoče izračunati hitrost, izraženo v vrtljajih: n0 = 60 f 1 / p.
Poleg teh podatkov je treba vedeti, da se bodo lastnosti razlikovale od prostega teka, torej pri ω = ω 0, in ob obremenitvi, ko ω ≠ ω 0. In koristno bi bilo tudi spomniti, da je pod obremenitvijo takšna stvar kot zdrs, ki se pojavi zaradi zamika ω od ω 0. In izražen je kot: s = (ω 0 - ω) / ω 0. To kaže, da je pri gradnji ACS s povečanjem te vrednosti potrebno samodejno spremeniti napetostno frekvenco v navitjih za zagotovitev stabilnosti hitrosti pri različnih obremenitvah .
Industrijski frekvenčni pogoni
Vsi industrijski chastotniki zagotavljajo različna načela za nadzor hitrosti in trenutka na gredi indukcijskih motorjev s spreminjanjem ne samo frekvence, temveč tudi faznega premika, časa vzpona regulacijskih impulzov, dinamičnega zaviranja in mnogih drugih parametrov. Hkrati se vse to izvede samodejno brez dodatnega sodelovanja od zunaj. Zato je industrijsko vezje frekvenčnega pretvornika za trifazni motor sestavljeno iz naslednjih komponent:
 Osrednji procesor, ki deluje kot oblikovalec glavnih in nadzornih impulzov.
Osrednji procesor, ki deluje kot oblikovalec glavnih in nadzornih impulzov.- Napajalna enota: usmernik in hkrati krmilna enota, vgrajena na IGBT - module.
- Vhodna in izhodna enota podatkov ali samo vmesnik za interakcijo z uporabnikom.
- Pretvornik vodila za delo s programskim nadzornim sistemom.
Trifazni motor je lahko opremljen s senzorjem, nato pa so potrebne povratne informacije. Senzor je lahko optični, induktivni ali magnetni. V motorjih z visokim številom vrtljajev se hitrost izračuna programsko glede na značilnosti.
Prednosti uporabe frekvenčnih pretvornikov
Ni za nič, da so ljudje začeli aktivno uporabljati frekvenčne pretvornike v vseh vrstah podjetij in celo v vsakdanjem življenju, saj so veliko varčnejši od kolektorskih motorjev in lahko delujejo v pogojih, v katerih se krtačni motor hitro pokvari. Poleg vsega naštetega je uporaba frekvenčnega pretvornika omogočala zamenjavo mehanskih različic s pogonskimi sistemi, kar je močno poenostavilo zasnovo opreme. Glede na to, da DPT med obratovanjem praktično ne potrebuje popravil, je uporaba razsmernika preprosto idealna rešitev.
Vendar je treba razumeti, da obstajajo regulativne meje, pri katerih se bo spremenilo tudi načelo krmiljenja indukcijskega motorja:
- Pri regulaciji hitrosti v območju 16: 1 ali manj je treba uporabiti razsmernik, ki deluje na frekvenčni odziv.
- Za regulacijo v območju 50: 1 je treba uporabiti krmiljenje brez senzorjev.
- V velikih razponih je treba uporabljati povratne informacije s pomočjo senzorjev ali pid regulatorja, ki je vgrajen v pretvornik.
V vsakem primeru, ko je motor predviden za uporabo v težkih delovnih pogojih, kar se običajno zgodi, je bolje uporabiti vektorsko krmiljenje.
Vektorska in frekvenčna regulacija
 Da bi zgradili visokokakovosten sistem samohodnih pištol z asinhronim krmiljenjem motorja, je treba dobro razumeti koncepte, in sicer vektorsko uravnavanje ali regulacijo frekvence.
Da bi zgradili visokokakovosten sistem samohodnih pištol z asinhronim krmiljenjem motorja, je treba dobro razumeti koncepte, in sicer vektorsko uravnavanje ali regulacijo frekvence.
Načelo frekvence se uporablja v sistemih, kjer ni treba strogo nadzorovati hitrosti, pomemben pa je pretok, ki ga ustvari motor brez večje obremenitve. Kadar pa je potrebno zagotoviti visok navor in dobro oprijem od prvega zavoja, je treba uporabiti vektorski nadzor.
Vektorske samovozeče puške se uporabljajo tudi v sledilnih sistemih z nizko hitrostjo podajanja. Na primer, v strojih za podajanje miz ali vreteno. Tu ni potrebno le premagati vztrajnosti ležišča, ampak tudi zagotoviti potreben napor pri obdelavi dela.
Pri načrtovanju chastotnika za trifazni elektromotor z lastnimi rokami je potrebno upoštevati vrsto obremenitve, saj bo od tega odvisna tudi značilnost krmiljenja močnostnih stikal, da dosežete potrebno moč z minimalnimi izgubami.
Tehnična izvedba pretvornikov
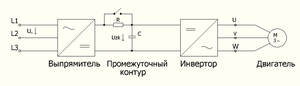
Tako pridemo do izdelave kontrolne blok-sheme indukcijskega motorja. Takoj morate zagotoviti, da skoraj vsi proizvajalci te vrste pretvornikov uporabljajo isti blok vezja, ki ga lahko uporabite za načrtovanje lastnega pretvornika. In je sestavljen iz naslednjih komponent:
 Nenadzorovana usmerjevalna trifazna napetost 380 V ali enofazna omrežna napetost 220 V.
Nenadzorovana usmerjevalna trifazna napetost 380 V ali enofazna omrežna napetost 220 V.- DC vodilo z vgrajenim LC - filtrom, sestavljeno iz niza kondenzatorjev, ki zagotavljajo njegovo stabilno napolnjenost in odpravljajo valovanje med sunki v omrežju.
- Napetostni pretvornik, ki pretvori konstantno vmesno napetost v izmenično napetost želene frekvence. Opremljen je s PWM za nadzor kakovosti.
- Asinhroni elektromotor, ki ga upravljamo.
Treba je povedati, da so proizvajalci že dolgo hodili v smeri ustvarjanja idealnega PWM-ja, s katerim bi bilo mogoče stabilno nadzorovati motor. In šele s pojavom modulov IGBT je to postalo mogoče. Zato za izdelavo lastnega pretvornika priporočamo uporabo tipk z napetostjo najmanj 1200 V, ob upoštevanju možnih nihanj omrežja in z dobrim trenutnim robom. Na trgu je povsem mogoče najti tranzistorje in module do 100 ali več A.
Poenostavljeno vezje blokovnega pretvornika bo videti tako:
 Usmernik, njegova povezava se izvede po načelu eno- ali dvofaznega mostnega vezja. Zasnovan je za pretvorbo izmenične napetosti v enosmerni tok, primeren za nadaljnjo pretvorbo frekvence iz 0 Hz v omrežno frekvenco. Vmesni krog pogojno sestoji iz dveh blokov:
Usmernik, njegova povezava se izvede po načelu eno- ali dvofaznega mostnega vezja. Zasnovan je za pretvorbo izmenične napetosti v enosmerni tok, primeren za nadaljnjo pretvorbo frekvence iz 0 Hz v omrežno frekvenco. Vmesni krog pogojno sestoji iz dveh blokov:- Naprave za nemoteno polnjenje vodila, da ne poškodujete vodov toka pri polnjenju kondenzatorjev. Imenuje se balastna odpornost.
- Blok kondenzatorjev je filter.
Izračunana napetost vmesnega vezja je √2-krat večja od U N. Po doseganju zahtevane konstantne napetostne ravni na vodilu je upor mostičen s kontaktnim parom. Zadnji blok v vezju je razsmernik. To je končni gonilnik izhodnih impulzov, ki se nato napajajo v motorju, kar zagotavlja njegovo vrtenje pri določeni hitrosti.
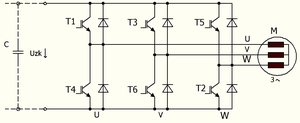
Splošna struktura napajalnega modula je prikazana na naslednji sliki:
 Za izdelavo pretvornika se uporabljajo visokotokovni tranzistorji, ki delujejo v izključno stikalnem načinu. V procesu so zelo vroče, zato jih namestimo na velike radiatorje z velikim območjem odvajanja toplote.
Za izdelavo pretvornika se uporabljajo visokotokovni tranzistorji, ki delujejo v izključno stikalnem načinu. V procesu so zelo vroče, zato jih namestimo na velike radiatorje z velikim območjem odvajanja toplote.
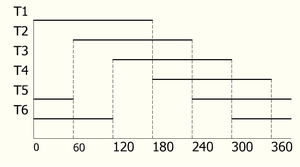
Če želite oblikovati krmilno vezje inverterja, si morate jasno predstavljati pomanjkljivost tipk. Če želite to narediti, bodite pozorni na spodnjo sliko:
Prikaže časovne intervale za vsako od tipk, nameščenih v tem vrstnem redu, kot je prikazano na prejšnji sliki. To pomeni, da v fazi U delujejo tranzistorji T1 in T4, v fazi V - T3 in T6 in tako naprej. Za vsako od motornih navitij kup kup IGBT. Pri izdelavi pretvornika za motorje z majhno močjo z nizkimi tokovi lahko uporabite preproste bipolarne ali poljske tranzistorje.
Časovni diagram kaže, da se v prvem trenutku odprejo tranzistorji T1, T5 in T6. Nadalje sta tranzistorja T1 in T6 še naprej odprta, medtem ko se T5 zapre in T2 odpre in tako naprej. Ta diagram v celoti ponavlja diagram napetosti v 3-faznem omrežju, vendar imajo samo impulzi pravokotno obliko in frekvenco, ki jo nastavi regulator.
Rezultat je nekakšno ciklično preklapljanje tranzistorjev, medtem ko se tok v fazah medsebojno pomika za 120 °. In za pridobitev krmilne napetosti, sestavljene iz številnih impulzov, v obliki sinusoidnega signala z minimalnim številom harmonik, uporabite razmerje vklopljenih in izklopljenih tranzistorjev.
Da bi zmanjšali izgube motorja, ki se običajno pojavijo med poskusi krmiljenja z zmanjšanjem napetosti v navitjih motorja, se zatečejo k povečanju frekvence.
Načelo regulacije hitrosti
Za spremembo hitrosti vrtenja gredi motorja je potrebno spremeniti frekvenco f 1, vendar je to treba storiti previdno. Konec koncev je treba ohraniti magnetizacijski tok nespremenjen. Za ohranitev tega ravnovesja mora biti U 1 sorazmeren s f 1., če pa je ravnotežje porušeno, se bo magnetizacijski tok bodisi zmanjšal bodisi povečal. V skladu s tem bo polje oslabilo ali prenasičeno. Da bi to zagotovili, je izbrana značilnost u / f linearna, dokler ni dosežena kotna frekvenca. Pojavi se, ko se napetost na navitjih dvigne na največjo oznako.